
















 Tin tức
Tin tức
Sự khác biệt giữa rtk và ppk.
UAV . được sử dụng rộng rãi, với chi phí thấp, đa tác vụ, khả năng cơ động tốt, hiệu quả cao và thấp Bức xạ. Họ . được sử dụng rộng rãi trong tất cả các khía cạnh của quân đội và dân sự Sản xuất.
Bởi vì . GPS có các đặc điểm của mọi thời tiết, Độ chính xác cao và đo tự động, UAV Hiện đang được sử dụng để khảo sát và ánh xạ về cơ bản sử dụng GPS để định vị và điều hướng. GPS Điểm đơn định vị độ chính xác của. UAV . điều khiển bayquá nghèo. Trước đây, một số lượng lớn các điểm kiểm soát hình ảnh đã được sử dụng để sửa hình ảnh biến dạng.
Tuy nhiên, ở một số địa hình đặc biệt (như núi, thung lũng, sông, v.v.), rất khó để nhân viên thực địa triển khai kiểm soát hình ảnh điểm. Để giảm khối lượng công việc, hầu hết các điểm kiểm soát hình ảnh thậm chí không cần thiết, và cần phải cải thiện độ chính xác định vị của máy bay, RTK Công nghệ và công nghệ PPK có thể đạt được Cấp độ centimet độ chính xác.
Dưới đây chúng tôi bắt đầu từ hai nguyên tắc kỹ thuật của RTK và PPK, và tiến hành phân tích so sánh để tìm một phương pháp phù hợp hơn cho GPS Air Định vị.
1. . Nguyên tắc làm việc của RTK

RTK . (thời gian thực chuyển động) Hệ thống đo thường bao gồm ba phần: Nhận GPSThiết bị, hệ thống truyền dữ liệu và hệ thống phần mềm cho động Đo lường. Rtk Công nghệ đo lường dựa trên quan sát giai đoạn vận chuyển và có độ chính xác nhanh và độ chính xác cao Định vị Chức năng. Công nghệ đo vi sai pha vận chuyển có thể thu được kết quả định vị ba chiều thời gian thực của trạm đo trong hệ tọa độ được chỉ định và có centimet-level Định vị Độ chính xác.
Nguyên tắc làm việc của RTK .Đo lường là: Đặt một máy thu trên trạm gốc và đặt máy thu khác trên tàu sân bay (được gọi là Điện thoại di động Trạm). Trạm cơ sở và trạm di động đồng thời nhận được các tín hiệu được gửi bởi cùng một GPS Vệ tinh. Giá trị quan sát thu được được so sánh với thông tin vị trí đã biết để có được sự điều chỉnh chênh lệch GPS Giá trị. Sau đó, giá trị sửa chữa được gửi đến trạm di động của vệ tinh công cộng VIA Trạm liên kết dữ liệu vô tuyến kịp thời để tinh chỉnh giá trị quan sát GPS để có được vị trí thời gian thực chính xác hơn của trạm di động sau sự khác biệt Sửa chữa.
Hiện tại, độ chính xác của mặt phẳng định vị của nhà sản xuất chính thống RTK có thể đạt tới 8 mm + . 1ppm, và độ chính xác độ cao có thể đạt 15mm + . 1ppm. Có hai phương thức giao tiếp chính giữa trạm gốc và di động Trạm: Đài phát thanh và Mạng. Tín hiệu đài phát thanh ổn định và khoảng cách truyền tín hiệu mạng dài và mỗi lần đều có ưu điểm của riêng mình!
Thứ hai, nguyên tắc làm việc của PPK
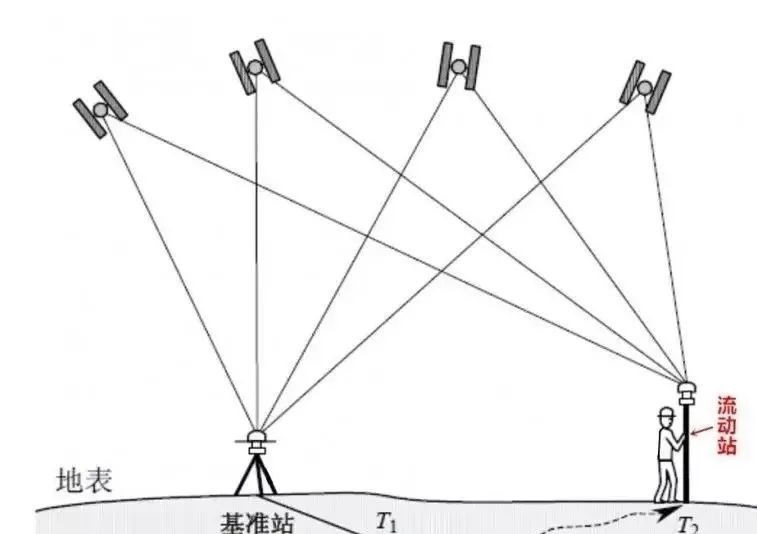
Nguyên tắc làm việc của PPK (xử lý hậu kỳ Động học, GPS Dynamic Xử lý hậu kỳ KHÁC BIỆT) Công nghệ là sử dụng máy thu trạm gốc để quan sát đồng thời và ít nhất một máy thu di động để quan sát đồng thời GPS Vệ tinh. Nói cách khác, trạm gốc vẫn còn liên tục. Sau khi quan sát việc khởi tạo, Rover di chuyển đến điểm tiếp theo sẽ được xác định và cần phải giữ theo dõi liên tục của vệ tinh trong Việc tái định cư để chuyển sự mơ hồ của vệ tinh. Cả tuần đến lịch trình Thời gian.
Dữ liệu nhận được bởi trạm tham khảo và Rover cùng lúc được kết hợp tuyến tính trong máy tính để tạo thành giá trị quan sát pha của sóng mang ảo để xác định vị trí tương đối giữa Bộ thu. Cuối cùng, tọa độ đã biết của trạm tham khảo được giới thiệu để có được tọa độ ba chiều của Rover.
Công nghệ PPK là công nghệ vi sai động GPS sớm nhất (cũng được biết đến là Bán động Phương pháp, Quasi-Dynamic Phương pháp định vị tương đối, dừng và đi Sự khác biệt chính giữa nó và rtk Công nghệ là nó thiết lập truyền dữ liệu thời gian thực trên các trạm gốc và trạm Rover (như RTK), nhưng sau khi quan sát định vị, dữ liệu định vị được thu thập bởi hai máy thu GPS sẽ được xử lý cùng nhau sau khi đo lường tọa độ Vị trí của trạm di động ở thời điểm tương ứng Thời gian. Rover không nghiêm ngặt bị hạn chế. Ưu điểm của nó là độ chính xác định vị cao, hiệu quả công việc cao, bán kính làm việc lớn và dễ dàng hoạt động.
3. . So sánh RTK và ppk.
Điểm tương đồng giữa RTK và ppk.
1. . Chế độ hoạt động là giống nhau. Cả hai công nghệ đều sử dụng chế độ vận hành của Trạm tham khảo Plus Rover.
2. . Cả hai công nghệ cần được khởi tạo trước khi Hoạt động.
3. . Cả hai có thể đạt Cấp độ centimet độ chính xác.
Sự khác biệt giữa rtk và ppk.
1. . Giao tiếp khác nhau Phương pháp. RTK . Công nghệ yêu cầu một đài phát thanh hoặc mạng để truyền vi sai Dữ liệu. Công nghệ PPK không yêu cầu hỗ trợ công nghệ truyền thông và có thể ghi dữ liệu tĩnh
2. . Định vị khác nhau Phương pháp. Công nghệ định vị thời gian thực được sử dụng bởi RTK Cho phép bạn xem tọa độ và độ chính xác của điểm đo trên Rover tại bất kỳ thời gian nào; Định vị PPK là một xử lý hậu kỳ định vị, và tọa độ của điểm không thể được nhìn thấy trên trang web. Nó cần Xử lý hậu kỳ để xem Kết quả.
3. . Bán kính làm việc là khác nhau. RTK . Hoạt động bị hạn chế bởi Truyền thông Trạm. Khoảng cách hoạt động thường không vượt quá 10 km. Chế độ mạng cần khu vực được bao phủ bởi mạng Tín hiệu. Sử dụng công nghệ PPK, bán kính vận hành chung có thể đạt 50 km.
4. . Mức độ ảnh hưởng của tín hiệu vệ tinh là khác nhau. Trong quá trình RTK Hoạt động, nếu nó nằm gần một chướng ngại vật như cây lớn, thật dễ dàng để mất khóa; Trong khi trong hoạt động PPK, thường không dễ bị mất khóa sau khi khởi tạo.
5. . Định vị khác nhau Độ chính xác. RTK . Độ chính xác của máy bay 8 mm + . 1ppm, độ chính xác độ cao 15mm + . 1ppm . Độ chính xác của mặt phẳng PPK 2,5mm + . 0,5ppm, độ chính xác độ cao 5mm + . 0,5ppm.
6. . định vị khác nhau tần số. Tần số mà rtk Trạm cơ sở gửi dữ liệu vi phân và trạm di động nhận được nói chung là 1-2 Hz, và tần số định vị tối đa của PPK có thể đạt tới 50Hz.
So sánh Phân tích:
1. . Tốc độ bay của máy bay không người lái trong không khí rất nhanh và cần có định vị cao Tần số. Điều hướng thời gian thực của RTK Công nghệ rất khó đạt được điều này Điều kiện. Hỗ trợ PPK 50Hz Tần số định vị, có thể đáp ứng đầy đủ nhu cầu.
2. . RTK . cung cấp vị trí thời gian thực thông tin. PPK có thể giải quyết dữ liệu Epoch trong một khoảng thời gian thông qua Xử lý hậu kỳ. Tỷ lệ cố định không chỉ có thể tăng, mà độ chính xác độ phân giải là cao hơn.
3. . RTK . Yêu cầu một mô-đun truyền thông vô tuyến hoặc mạng, nhưng PPK không, có thể làm giảm gánh nặng của máy bay không người lái và kéo dài cuộc sống chuyến bay của máy bay.
4. . Khoảng cách lái xe của RTK .bị hạn chế, và khoảng cách lái xe của PPK có thể đạt tới 50km. Ở các khu vực vận hành đường dài và quy mô lớn, đặc biệt là các khu vực vành đai, chẳng hạn như đường dây điện, đường, đường sắt, đường ống dẫn dầu và khí, PPK sẽ là tốt nhất Lựa chọn.
Bốn, để tóm tắt
Mặc dù . RTK . có thể cung cấp độ chính xác cao Thông tin vị trí Trong thời gian thực, hiện có những khó khăn kỹ thuật tuyệt vời trong ứng dụng UAV. Ưu điểm lớn nhất của ppk.trên rtk là nó có thể được xử lý sau thực tế, và có thể được đảo ngược lọc (đảo ngược kalman bộ lọc), có thể giải quyết vấn đề của một số vệ tinh bị mất khóa và cải thiện độ chính xác định vị thông qua Fusion và Reverse.
Công nghệ PPK là một định vị không gian công nghệ. Với sự phát triển của công nghệ, nó phù hợp hơn để cài đặt trên máy bay không người lái. UAV . Công nghệ đang ngày càng trở nên nhiều hơn trưởng thành. Các hoạt động quy mô lớn hiệu quả hơn so với truyền thống rtk đo lường. Công nghệ PPK rõ ràng có triển vọng phát triển rộng rãi trong lĩnh vực máy bay không người lái. Công nghệ PPK chắc chắn sẽ trở thành xương sống của máy bay không người lái trong khảo sát và lập bản đồ.
WellHope . Sản xuất không dây có trụ sở tại 5G 4G; MIMO; GNSS Ăng-ten Drone. ; GSM; 3G; WLAN; LTE Ăng-ten và Pigtail RF Cáp; Thêm câu hỏi hoặc hỏi thăm Vui lòng gửi cho chúng tôi Email; wh@wellhope-wirless.com.











